
Easa AliAbbasi
Postdoctoral Researcher | Max Planck Institute for Informatics
Google Scholar · LinkedIn . ORCID · GitHub . YouTube
Email: easa.aliabbasi[at]mpi-inf.mpg.de
About
I am a postdoctoral researcher at the Max Planck Institute for Informatics and a member of the Sensorimotor Interaction Group. I received my Ph.D. degree from Koç University in January 2024. During my Ph.D. studies at the Robotics and Mechatronics Laboratory (RML), I worked on characterizing electroadhesive tactile displays and understanding the human sense of touch. My current research interests include haptics, human-computer interaction (HCI), and the intersection of haptics and AI. In my research, I aim to develop methods and tools for understanding human sense of touch, developing AI models to enhance haptics, and developing tactile displays to convey sensory information.
I publish my work in haptics and HCI venues and I actively reviewed for IEEE WHC23, UIST24, Tribology International, Eurohaptics24, Hardware X Journal 24, Augmented Humans 25, Hardware X Journal 25, IEEE WHC25, CHI25, UIST25, IEEE Transactions on Visualization and Computer Graphics 25, International Journal of Human Computer Studies 25, CHI26, IEEE VR26, IEEE Haptics Symposium 26, Augmented Humans 26, and IEEE ToH. I received two special recognitions for outstanding reviews in UIST24 and WHC25.
Education
- Ph.D., Computational Sciences and Engineering (01/2020 — 01/2024)
- M.Sc., Mechatronics Engineering (09/2014 — 02/2017)
- B.Sc., Electrical and Electronics Engineering (09/2010 — 08/2014)
Visiting Researcher
- Pole Leonard de Vinci Institute, Paris, France (10/2025 — 11/2025)
- University of Oslo, Oslo, Norway (10/2022 — 12/2022)
Research Interests
- Haptics
- Human-Computer Interaction (HCI)
- Intersection of Haptics and AI
Publications
† denotes equal contributions.Journal and Conference Publications
-
E. AliAbbasi, D. Wittchen, Y. Li, S. Lu, T. Müller, D. Degraen, T. Leimkühler, S. H. Yoon, H. Seifi, O. Schneider, H. Culbertson, J. Steimle, and P. Strohmeier. “AI for Haptics and Haptics for AI: Challenges and Opportunities”, Extended Abstracts of the 2026 CHI Conference on Human Factors in Computing Systems (CHI EA’26), Barcelona, Spain, Association for Computing Machinery, 2026.
[PDF] · [BibTeX]@inproceedings{aliabbasi2026ai, title = {AI for Haptics and Haptics for AI: Challenges and Opportunities}, author = {AliAbbasi, Easa and Wittchen, Dannis and Li, Yinan and Lu, Shihan and Müller, Thomas and Degraen, Donald and Leimkühler, Thomas and Yoon, Sang Ho and Seifi, Hasti and Schneider, Oliver and Culbertson, Heather and Steimle, Jürgen and Strohmeier, Paul}, booktitle = {Extended Abstracts of the CHI Conference on Human Factors in Computing Systems (CHI EA’26)}, abstract = {AI has transformed methods and knowledge across many domains. However, the intersection of AI and haptics remains underexplored. While modern AI techniques-fueled by machine learning and using powerful techniques such as generative modeling and reinforcement learning-offer powerful opportunities for advancing haptic design, insights from haptics research, such as perception modeling and adaptive interaction-grounded in human touch, embodiment , and multisensory integration-can also play a critical role in shaping more human-centered AI systems. This workshop will bring together an interdisciplinary community of researchers from HCI, haptics, AI, robotics, and design to (1) identify pressing questions in haptics that could benefit from AI approaches and (2) highlight ways in which haptic knowledge can support the development of embodied and context-aware AI. Through position papers and paper presentations, we will map key challenges, exchange methods, and explore new research directions that connect the two fields. By framing haptics and AI as mutually reinforcing, the workshop aims to build a shared research agenda and foster collaborations that advance both the science of touch and the design of intelligent interactive systems.}, year = {2026}, publisher = {Association for Computing Machinery}, address = {Barcelona, Spain} } -
A. Jingu†, E. AliAbbasi†, P. Strohmeier, J. Steimle. “Scene2Hap: Combining LLMs and physical modeling for automatically generating vibrotactile signals for full VR scenes”, arXiv preprint, arXiv:2504.19611, 2025.
[PDF] · [BibTeX]@article{jingu2026scene2hap, title = {Scene2Hap: Combining LLMs and physical modeling for automatically generating vibrotactile signals for full VR scenes}, author = {Jingu, Arata and AliAbbasi, Easa and Steimle, Jürgen and Strohmeier, Paul}, booktitle = {Extended Abstracts of the CHI Conference on Human Factors in Computing Systems (CHI EA’26)}, abstract = {Haptic feedback contributes to immersive virtual reality (VR) experiences. Designing such feedback at scale, for all objects within a VR scene and their respective arrangements, remains a time-consuming task. We present Scene2Hap, an LLM-centered system that automatically designs object-level vibrotactile feedback for entire VR scenes based on the objects' semantic attributes and physical context. Scene2Hap employs a multimodal large language model to estimate the semantics and physical context of each object, including its material properties and vibration behavior, from the multimodal information present in the VR scene. This semantic and physical context is then used to create plausible vibrotactile signals by generating or retrieving audio signals and converting them to vibrotactile signals. For the more realistic spatial rendering of haptics in VR, Scene2Hap estimates the propagation and attenuation of vibration signals from their source across objects in the scene, considering the estimated material properties and physical context, such as the distance and contact between virtual objects. Results from two user studies confirm that Scene2Hap successfully estimates the semantics and physical context of VR scenes, and the physical modeling of vibration propagation improves usability, perceived materiality, and spatial awareness.}, year = {2025}, publisher = {arXiv preprint} } -
E. AliAbbasi, N. Sabnis, Y. Ding, N. Wagener, and P. Strohmeier. “Haptic redirection: Modulating hand movement speed with vibrotactile feedback”, Proceedings of the Mensch und Computer 2025 (MuC ’25), Chemnitz, Germany, Association for Computing Machinery, 631–636, 2025.
[PDF] · [BibTeX]@inproceedings{aliabbasi2025haptic_redirection, author = {AliAbbasi, Easa and Sabnis, Nihar and Ding, Yuran and Wagener, Nadine and Strohmeier, Paul}, title = {Haptic Redirection: Modulating Hand Movement Speed with Vibrotactile Feedback}, year = {2025}, isbn = {9798400715822}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3743049.3748585}, doi = {10.1145/3743049.3748585}, abstract = {Redirecting user movement in Virtual Reality (VR) can expand perceived virtual space while accommodating limited physical space. Existing methods primarily rely on visual and auditory cues. This work explores the foundation for an alternative approach using haptic cues. We were inspired by the observation that vibrations arise when a finger moves over a textured surface, influenced by two factors: the scanning speed and the surface properties. While prior research has focused on using vibrations to modify texture perception, we investigate the second factor; modifying vibrations to influence movement speed. Through three psychophysical experiments, we show that: (1) Human movement speed is affected by the properties of vibrotactile feedback. (2) Movement speed remains unchanged during transitions if users are aware of vibrotactile feedback changes. However, we found that (3) movement speed increases by ∼ 20\% when vibration pulses are reduced by 50\%, provided users are unaware of the vibrotactile feedback change.}, booktitle = {Proceedings of the Mensch Und Computer 2025}, pages = {631–636}, numpages = {6}, keywords = {Hand Redirection, Virtual Reality, Vibrotactile Haptics, Perception, Sensorimotor Contingencies}, location = {Chemnitz, Germany}, series = {MuC '25} } -
E. AliAbbasi†, G. Vega†, D. Wittchen†, and P. Strohmeier. “Physical compliance and the compliance illusion: The importance of action for perception”, IEEE World Haptic Conference (WHC), Suwon, Korea, IEEE, 2025.
[PDF] · [BibTeX]@inproceedings{aliabbasi2025physical_compliance, author={AliAbbasi, Easa and Vega, Gabriela and Wittchen, Dennis and Strohmeier, Paul}, booktitle={2025 IEEE World Haptics Conference (WHC)}, title={Physical Compliance and the Compliance Illusion: The Importance of Action for Perception}, year={2025}, pages={349-356}, abstract={The perception of an object's compliance can be manipuated using the grain-based vibrotactile compliance illusion. Despite the growing interest in creating virtual compliance using this method, its perceptual mechanism is poorly understood. To address this gap in knowledge, we present a detailed analysis of compliance estimates and pressure profiles of exploration behaviors of 12 participants while perceiving both physical and virtual compliance. Our results indicate that the experience of virtual compliance provided by the compliance illusion is distinct from that of physical compliance and that these experiences are mediated by distinct sensorimotor processes. This is evident in the non-additive nature of both real and illusory compliance perceptions and the separable exploratory actions of the participants in response to real and illusory compliance. These insights affect the design of augmented and virtual tactile reality systems, shed light on the mechanisms of compliance illusion, and provide data in support of closed-loop theories of tactile perception.}, location={Suwon, Korea}, publisher={IEEE}, doi={10.1109/WHC64065.2025.11123193} } -
P. Strohmeier, L. Turmo Vidal, G. Vega, C. N. Reed, A. Mazursky, E. AliAbbasi, A. Tajadura-Jimenez, and J. Steimle. “Sensorimotor devices: Coupling sensing and actuation to augment bodily experience”, Extended Abstracts of the CHI Conference on Human Factors in Computing Systems (CHI EA’25), Yokohama, Japan, Association for Computing Machinery, 2025.
[PDF] · [BibTeX]@inproceedings{strohmeier2025sensorimotor, author = {Strohmeier, Paul and Turmo Vidal, Laia and Vega, Gabriela and Reed, Courtney N. and Mazursky, Alex and AliAbbasi, Easa and Tajadura-Jim\'{e}nez, Ana and Steimle, J\"{u}rgen}, title = {Sensorimotor Devices: Coupling Sensing and Actuation to Augment Bodily Experience}, year = {2025}, isbn = {9798400713958}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3706599.3706735}, doi = {10.1145/3706599.3706735}, abstract = {An emerging space in interface research is wearable devices that closely couple their sensing and actuation abilities. A well-known example is MetaLimbs [39], where sensed movements of the foot are directly mapped to the actuation of supernumerary robotic limbs. These systems are different from wearables focused on sensing, such as fitness trackers, or wearables focused on actuation, such as VR headsets. They are characterized by tight coupling between the user’s action and the resulting digital feedback from the device, in time, space, and mode. The properties of this coupling are critical for the user’s experience, including the user’s sense of agency, body ownership, and experience of the surrounding world. Understanding such systems is an open challenge, which requires knowledge not only of computer science and HCI, but also Psychology, Physiology, Design, Engineering, Cognitive Neuroscience, and Control Theory. This workshop aims to foster discussion between these diverse disciplines and to identify links and synergies in their work, ultimately developing a common understanding of future research directions for systems that intrinsically couple sensing and action.}, booktitle = {Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems}, articleno = {799}, numpages = {7}, keywords = {sensorimotor interaction, wearables, feedback systems, motion-coupled feedback}, location = {Yokohama, Japan}, series = {CHI EA '25} } -
J. Ahmad†, E. AliAbbasi†, M. A. Sormoli, and C. Basdogan. “Effect of finger orientation on contact stiffness and area during sliding”, IEEE Transactions on Haptics, 18(1):175–187, 2024.
[PDF] · [BibTeX]@article{ahmad2025effect, author={Ahmad, Jahangier and AliAbbasi, Easa and Sormoli, MReza Alipour and Basdogan, Cagatay}, journal={IEEE Transactions on Haptics}, title={Effect of Finger Orientation on Contact Stiffness and Area During Sliding}, year={2025}, volume={18}, number={1}, pages={175-187}, publisher={IEEE}, abstract={Earlier experimental studies showed that the apparent contact area of a human fingerpad shrinks and eventually reaches a steady-state value as it slides on a smooth surface, although the root causes of this reduction have not been fully understood yet. We hypothesize that finger rotation about its axial axis and the movement direction play critical roles in the area change. To test this hypothesis, we conducted an experimental study to investigate the evolution of apparent contact area between a human fingerpad and a smooth flat surface under normal loading (stationary finger) and combined loading (sliding finger) conditions for 4 different internal rotations of the index finger (away from the second finger) about its axial (longitudinal) axis and 2 different sliding directions. Our results show a reduction in the contact area for radial sliding as expected, but a surprising increase in the ulnar direction for the higher finger rotations. We argue that this asymmetric behavior in contact area evolution stems from the changes in the equivalent radius of curvature and stiffening of the finger as the rotation angle increases, which manifests itself as the asymmetric stress distribution at the leading and trailing edges of the fingerpad in our finite element simulations.}, doi={10.1109/TOH.2024.3509219} } -
E. AliAbbasi, M. Muzammil, O. Sirin, Ø. G. Martinsen, P. Lefèvre, and C. Basdogan. “Effect of finger moisture on tactile perception of electroadhesion”, IEEE Transactions on Haptics, 17(4):841–849, 2024.
[PDF] · [BibTeX]@article{aliabbasi2024effect, author={AliAbbasi, Easa and Muzammil, Muhammad and Sirin, Omer and Lefèvre, Philippe and Martinsen, Ørjan Grøttem and Basdogan, Cagatay}, journal={IEEE Transactions on Haptics}, title={Effect of Finger Moisture on Tactile Perception of Electroadhesion}, year={2024}, volume={17}, number={4}, pages={841-849}, publisher={IEEE}, abstract={We investigate the effect of finger moisture on the tactile perception of electroadhesion with 10 participants. Participants with moist fingers exhibited markedly higher threshold levels. Our electrical impedance measurements show a substantial reduction in impedance magnitude when sweat is present at the finger-touchscreen interface, indicating increased conductivity. Supporting this, our mechanical friction measurements show that the relative increase in electrostatic force due to electroadhesion is lower for a moist finger.}, doi={10.1109/TOH.2024.3441670} } -
M. Awais†, E. AliAbbasi†, A. Atik†, M. Ali, R. Das, C. Dag, M. Bathaei, A. Ullah, R. Singh, K. Turker, C. Basdogan, and L. Beker. “Multiplexed piezoelectric electronic skin with haptic feedback for upper limb prosthetics”, Advanced Sensor Research, 3(12):2400100, 2024.
[PDF] · [BibTeX]@article{awais2024multiplexed, author = {Awais, Muhammad and AliAbbasi, Easa and Atik, Abdulkadir Yasin and Bathaei, Mohammad Javad and Ali, Mohsin and Das, Ritu and Dag, Cagdas and Ullah, Azmat and Singh, Rahul and Turker, Kemal Sitki and Basdogan, Cagatay and Beker, Levent}, title = {Multiplexed Piezoelectric Electronic Skin with Haptic Feedback for Upper Limb Prosthesis}, journal = {Advanced Sensor Research}, volume = {3}, number = {12}, pages = {2400100}, keywords = {capacitance, haptic feedback, multiplexed sensing, piezoelectricity, prosthesis, upper limb amputation}, doi = {https://doi.org/10.1002/adsr.202400100}, url = {https://advanced.onlinelibrary.wiley.com/doi/abs/10.1002/adsr.202400100}, eprint = {https://advanced.onlinelibrary.wiley.com/doi/pdf/10.1002/adsr.202400100}, abstract = {Abstract Upper limb amputation severely impairs tactile perception, limiting daily activities. Developing a near-natural replacement with prosthetic devices requires improving user sensory experiences during object interactions. The ideal upper limb prosthesis should provide real-time sensory feedback, mirroring natural experiences. Current prostheses struggle with providing adequate tactile feedback due to sensory limitations. Inspired by the sensory properties of skin, we present a micro-fabricated, multiplexed electronic skin (e-skin) with actuators for sensory feedback in upper limb amputation. The piezoelectric-capacitive sensor array detects static pressure, temperature, vibration, and texture, with integrated actuators stimulating the skin to provide real-time feedback. The sensors integrate with actuators via readout electronics, making the system standalone and easy to use. The flexible, compact sensor array design (two pixels within a 1 cm² footprint) detects a wide range of pressure (0.5–10 kPa), temperature (22–60 °C), vibration (35–100 Hz), and texture (2.5–45 Hz), suitable for daily use. The e-skin, attached to a prosthetic finger, is tested for feasibility on human volunteers with wrist-mounted actuators. Statistics are used to quantitatively assess system performance. The integration of multiplexed sensors and actuators enhances tactile feedback, improving the quality of life for people with upper limb amputations.}, year = {2024} } -
E. AliAbbasi, Ø. G. Martinsen, F. J. Petersen, J. E. Colgate, and C. Basdogan. “Experimental estimation of gap thickness and electrostatic forces between contacting objects under electroadhesion”, Advanced Intelligent Systems, 6(4):2300618, 2024.
[PDF] · [BibTeX]@article{aliabbasi2024experimental, author = {AliAbbasi, Easa and Martinsen, Ørjan Grottem and Pettersen, Fred-Johan and Colgate, James Edward and Basdogan, Cagatay}, title = {Experimental Estimation of Gap Thickness and Electrostatic Forces Between Contacting Surfaces Under Electroadhesion}, journal = {Advanced Intelligent Systems}, volume = {6}, number = {4}, pages = {2300618}, keywords = {interfacial air gap, bioimpedance, electrical impedance, electroadhesion, polarization, robotics, tactile displays}, doi = {https://doi.org/10.1002/aisy.202300618}, url = {https://advanced.onlinelibrary.wiley.com/doi/abs/10.1002/aisy.202300618}, eprint = {https://advanced.onlinelibrary.wiley.com/doi/pdf/10.1002/aisy.202300618}, abstract = {Electroadhesion (EA) is a promising technology with potential applications in robotics, automation, space missions, textiles, tactile displays, and some other fields where efficient and versatile adhesion is required. However, a comprehensive understanding of the physics behind it is lacking due to the limited development of theoretical models and insufficient experimental data to validate them. This article proposes a new and systematic approach based on electrical impedance measurements to infer the electrostatic forces between two dielectric materials under EA. The proposed approach is applied to tactile displays, where skin and voltage-induced touchscreen impedances are measured and subtracted from the total impedance to obtain the remaining impedance to estimate the electrostatic forces between the finger and the touchscreen. This approach also marks the first instance of experimental estimation of the average air gap thickness between a human finger and a voltage-induced capacitive touchscreen. Moreover, the effect of electrode polarization impedance on EA is investigated. Precise measurements of electrical impedances confirm that electrode polarization impedance exists in parallel with the impedance of the air gap, particularly at low frequencies, giving rise to the commonly observed charge leakage phenomenon in EA.}, year = {2024} } -
E. AliAbbasi, Ø. G. Martinsen, F.-J. Pettersen, and C. Basdogan. “Effect of electrode polarization impedance on electroadhesion”, IEEE World Haptics Conference-WIP, Delft, Netherlands, 2023.
[PDF] · [BibTeX]@inproceedings{aliabbasi2023effect, title={Effect of Electrode Polarization Impedance on Electroadhesion}, author={AliAbbasi, Easa and Martinsen, Ørjan G. and Pettersen, Fred-Johan and Basdogan, Cagatay}, booktitle={IEEE World Haptics Conference (WHC23)-WIP. IEEE}, location={Delft, Netherlands}, abstract={We investigate the effect of electrode polarization (EP) impedance on electroadhesion (EA) between a human finger and a voltage-induced touchscreen. By conducting precise measurements of electrical impedances, we could ascertain the presence of EP impedance that operates in parallel with the impedance of the air gap between finger and touchscreen. Our findings indicate that the EP impedance plays a dominant role, particularly at low frequencies, thereby giving rise to the charge leakage phenomenon commonly observed in EA.}, year={2023} } -
E. AliAbbasi, V. Aydingul, A. Sezgin, U. Er, S. Turkuz, and C. Basdogan. “Tactile perception of coated smooth surfaces”, IEEE Transactions on Haptics, 16(4):586–593, 2023.
[PDF] · [BibTeX]@article{aliabbasi2023tactile, author={AliAbbasi, Easa and Aydingul, Volkan and Sezgin, Alperen and Er, Utku and Turkuz, Seniz and Basdogan, Cagatay}, journal={IEEE Transactions on Haptics}, title={Tactile Perception of Coated Smooth Surfaces}, year={2023}, volume={16}, number={4}, pages={586-593}, abstract={Although surface coating is commonly utilized in many industries for improving the aesthetics and functionality of the end product, our tactile perception of coated surfaces has not been investigated in depth yet. In fact, there are only a few studies investigating the effect of coating material on our tactile perception of extremely smooth surfaces having roughness amplitudes in the order of a few nanometers. Moreover, the current literature needs more studies linking the physical measurements performed on these surfaces to our tactile perception in order to further understand the adhesive contact mechanism leading to our percept. In this study, we first perform 2AFC experiments with 8 participants to quantify their tactile discrimination ability of 5 smooth glass surfaces coated with 3 different materials. We then measure the coefficient of friction between human finger and those 5 surfaces via a custom-made tribometer and their surface energies via Sessile drop test performed with 4 different liquids. The results of our psychophysical experiments and the physical measurements show that coating material has a strong influence on our tactile perception and human finger is capable of detecting differences in surface chemistry due to, possibly, molecular interactions.}, keywords={Surface treatment;Surface roughness;Rough surfaces;Surface topography;Fingers;Coatings;Surface texture;Surface haptics;tactile perception;surface coating;contact mechanics;friction;surface energy;atomic force microscopy;roughness;adhesion}, doi={10.1109/TOH.2023.3274352} } -
E. AliAbbasi, A. Akseki, A. Ullah, and K. Pekkan. “Tension controlled two-axis hollow-fiber winding machine for blood oxygenator prototypes”, HardwareX, 14:e00434, 2023.
[PDF] · [BibTeX]@article{aliabbasi2023tension, author = {AliAbbasi, Easa and Akseki, Anil and Ullah, Azmat and Pekkan, Kerem}, title = {Tension controlled hollow-fiber winding machine for blood oxygenator prototypes}, journal = {HardwareX}, volume = {14}, pages = {e00434}, year = {2023}, issn = {2468-0672}, doi = {https://doi.org/10.1016/j.ohx.2023.e00434}, url = {https://www.sciencedirect.com/science/article/pii/S246806722300041X}, keywords = {Blood oxygenator, Cardiovascular devices, Composite materials with fibers, Winding, Hollow-fiber, Tension, PID, Control}, abstract = {Blood oxygenators involve a complex network of hollow fibers for efficient gas exchange with blood. The optimal microstructural arrangement of these fibers is an ongoing research interest. While the fiber systems of commercial oxygenators are manufactured to address mass production, the research oxygenator prototypes demand more flexibility so that different design parameters can be tested. Here a hollow-fiber assembly system is designed and built for winding research grade extracorporeal blood oxygenator mandrels at different layout dimensions so that these different configurations can be evaluated for mass transfer capacity and blood damage. The hardware design and manufacturing details of this system presented together with its impact on the prototype oxygenator device assembly process. This in-house built system can wind thin fibers, having outer diameters ranging from 100 μm to 1 mm, at any specified winding angle continuously. A control system for fiber stress is also incorporated to eliminate fiber damage. Our system consists of three main units: (1) unwinding, (2) accumulator, and (3) winding systems, integrated together via the control software. The unwinding unit has a PID controller to maintain the position of the accumulator motor on the reference point by tuning the velocity of feeding fibers to the accumulator unit. Another PID controller preserves the desired tension value of the fibers by adjusting the position of the accumulator motor. Desired tension value is defined by the user and typically obtained through uniaxial testing of fibers. The control unit employs a “cascaded” PID controller since the PID controller in the accumulator unit maintains the tension and the PID controller in the unwinding unit controls the position of the accumulator motor. Finally, the winding unit utilizes two motors to wind the fibers over the outer diameter of a mandrel at the desired winding angle. The first motor drives the translational movement, and the second one provides mandrel rotation. The desired angles are achieved by tuning the synchronous movement of the winding motors. While the system is designed to produce assembled blood oxygenator mandrel prototypes, this concept is also applicable for producing cylindrical fiber-reinforced composite materials with specified fiber angles and stents winded on jigs.} } -
E. AliAbbasi, M. A. Sormoli, and C. Basdogan. “Frequency-dependent behavior of electrostatic forces between human finger and touch screen under electroadhesion”, IEEE Transactions on Haptics, 15(2):416–428, 2022.
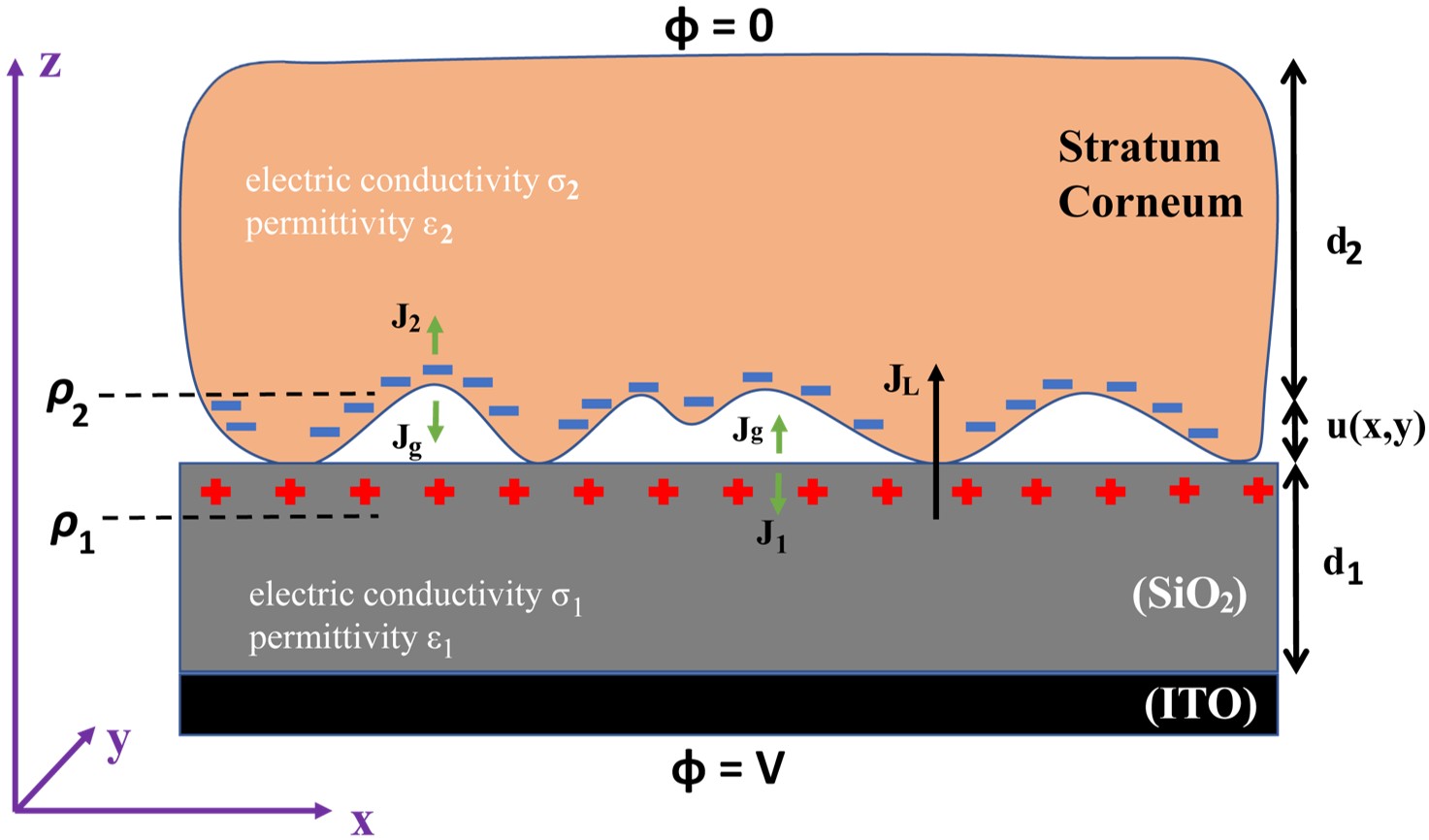
[PDF] · [BibTeX]@article{aliabbasi2022frequency, author={AliAbbasi, Easa and Sormoli, MReza Alipour and Basdogan, Cagatay}, journal={IEEE Transactions on Haptics}, title={Frequency-Dependent Behavior of Electrostatic Forces Between Human Finger and Touch Screen Under Electroadhesion}, year={2022}, volume={15}, number={2}, pages={416-428}, abstract={The existing lumped parameter circuit models do not capture the true (experimentally observed) behavior of electrostatic forces between human finger and a touch screen under electroadhesion, changing as a function of stimulation frequency. In order to address this problem, we first conducted an experiment to measure the voltage-induced frictional forces acting on the finger of a user sliding on a touch screen under constant normal force for stimulation frequencies ranging from 1 to 10$^6$ Hz. The steady-state values of coefficient of sliding friction for those frequencies and the value for voltage-free sliding (no electroadhesion) were utilized to estimate the magnitude of electrostatic force as a function of frequency. The experimental data shows that electrostatic force follows an inverted parabolic curve with a peak value around 250 Hz. Following the experimental characterization of electrostatic forces, an electro-mechanical model based on the fundamental laws of electric fields and Persson's multi-scale contact mechanics theory was developed. Compared to the existing ones in the literature, the proposed model takes into account the charge accumulation and transfer at the interfaces of finger and touch screen. The model is in good agreement with the experimental data and shows that the change in magnitude of electrostatic force is mainly due to the leakage of charge from the Stratum Corneum (SC) to the touch screen at frequencies lower than 250 Hz and electrical properties of the SC at frequencies higher than 250 Hz.}, keywords={Electrostatics;Touch sensitive screens;Force;Atmospheric modeling;Surface impedance;Permittivity;Insulators;Charge leakage;contact mechanics;electroadhesion;electrostatic forces;surface haptics;touch screen}, doi={10.1109/TOH.2022.3152030} } -
E. AliAbbasi, A. Allahverdizadeh, B. Dadashzadeh, and R. Jahangiri. “Non-contact AC current measurement using vibration analysis of a MEMS piezoelectric cantilever beam”, Journal of Energy Management and Technology, 4(4):28–35, 2020.
[PDF] · [BibTeX]@article {aliabbasi2020noncontact author = {AliAbbasi, Easa and Allahverdizadeh, Akbar and Dadashzadeh, Behnam and Jahangiri, Reza}, title = {Non-Contact AC Current Measurement Using Vibration Analysis of a MEMS Piezoelectric Cantilever Beam}, journal = {Journal of Energy Management and Technology}, volume = {4}, number = {4}, pages = {28-35}, year = {2020}, publisher = {Iran Energy Association (IEA)}, issn = {2588-3372}, doi = {10.22109/jemt.2020.194283.1188}, abstract = {This paper presents a non-contact system to measure electrical current crossing a wire. To do so, design and simulation of a piezoelectric cantilever beam with a tip mass is presented using mathematical modeling. The sandwich cantilever beam is composed of two piezoelectric layers and a mid-layer made up of steel. For mathematical modeling, the governing differential equation of the beam is extracted and solved by Galerkin method. Then the output voltage is calculated for different values of external forces. The force applied to the tip mass from the magnetic field of wire is used as external excitation force of the beam. According to the response of the output voltage, the current crossing the wire is calculated. Validation of the model is demonstrated compared to other references. In results section, frequency response behavior and influence of the geometric parameters on output voltage are analyzed. Appropriate values of these parameters should be used in design process of this non-contact sensor to have an observable applied force from the current carrying wire.}, keywords = {Bimorph cantilever beam,Piezoelectric,Electrical current measurement,Forced excitation,Non-contact sensor}, url = {https://www.jemat.org/article_102586.html}, eprint = {https://www.jemat.org/article_102586_970ffd48baa47fef0955d09e4f08a1fb.pdf} } -
E. AliAbbasi, A. Allahverdizadeh, B. Dadashzadeh, and R. Jahangiri. “Energy harvesting using MEMS porous functionally graded piezoelectric cantilever beam”, The 9th International Conference on Acoustics and Vibration (ISAV2019), Tehran, Iran, 2019.
[PDF] · [BibTeX]@inproceedings{aliabbasi2019energy, title={Energy harvesting using MEMS porous functionally graded piezoelectric cantilever beam}, author={AliAbbasi, Easa and Allahverdizadehb, Akbar and Dadashzadehb, Behnam and Jahangiri, Reza}, booktitle={The 9th International Conference on Acoustics \& Vibration}, location={Tehran, Iran}, year={2019} } -
E. AliAbbasi, A. Allahverdizadeh, R. Jahangiri, and B. Dadashzadeh. “Design and analysis of a piezoelectric-based AC current measuring sensor”, International Journal of Mechanical and Mechatronics Engineering, Vol. 11, No. 10, pp. 1678–1683, 2017.
[PDF] · [BibTeX]@article{aliabbasi2017design, author = {AliAbbasi, Easa and Allahverdizadeh, Akbar and Jahangiri, Reza and Dadashzadeh, Behnam}, title = {Design and Analysis of a Piezoelectric-Based AC Current Measuring Sensor}, year = {2017}, vol = {11}, no = {10}, organization = {World Academy of Science, Engineering, and Technology}, Journal = {International Journal of Mechanical and Mechatronics Engineering}, doi = {10.5281/zenodo.1132447} } -
E. AliAbbasi, A. Allahverdizadeh, and B. Dadashzadeh. “Analytical model for non-contact electrical current measurement using piezoelectric cantilever beams”, The 6th International Conference on Acoustics and Vibration (ISAV2016), Tehran, Iran, 2016.
[BibTeX]@inproceedings{aliabbasi2016analytical, title={Analytical model for non-contact electrical current measurement using piezoelectric cantilever beams}, author={AliAbbasi, Easa and Allahverdizadehb, Akbar and Dadashzadehb, Behnam}, booktitle={The 6th International Conference on Acoustics \& Vibration}, location={Tehran, Iran}, year={2016} } -
F. Mirlou Miavagh, E. AliAbbasi, A. Rikhtegar Ghiasi, and M. Asadollahi. “Applying of PID, FPID, TID and ITID controllers on AVR system using particle swarm optimization (PSO)”, Proceedings of the IEEE 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), pp. 866-871, Tehran, Iran, IEEE, 2015.
[PDF] · [BibTeX]@inproceedings{mirlou2015applying, author={Mirlou Miavagh, Fariborz and AliAbbasi, Easa and Rikhtegar Ghiasi, Amir and Asadollahi, Mostafa}, booktitle={2015 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI)}, title={Applying of PID, FPID, TID and ITID controllers on AVR system using particle swarm optimization (PSO)}, year={2015}, pages={866-871}, abstract={Some methods are available to optimize problems such as Particle Swarm Optimization (PSO)-which is a computational method-by having a population of candidate solutions. In this paper we presented four PID, FPID, TID and ITID controllers and applied each one on four different error functions in an AVR system by means of PSO algorithm. This performance led us to a specific conclusion and also a comprehensive result was drawn out of the system's response and diagrams. According to rising time, settling time and overshoot percentage, we gathered a presentation that helps everyone to find the best controller easily while working with different error functions.}, keywords={Decision support systems;Generators;Transfer functions;Optimization;particle swarm optimization;pso;pid;fpid;tid;itid;avr system}, doi={10.1109/KBEI.2015.7436157} }
Dataset
- E. AliAbbasi, Ø. G. Martinsen, F.-J. Pettersen, J. E. Colgate, C. Basdogan. “Experimental estimation of gap thickness and electrostatic forces between contacting surfaces under electroadhesion”, 2024. DOI
- G. Vega, D. Wittchen, P. Strohmeier, and E. AliAbbasi. “Physical compliance and the compliance illusion: The importance of action for perception”, 2023. DOI
- J. Ahmad†, E. AliAbbasi†, M. A. Sormoli, and C. Basdogan. “Fingerpad contact area evolution under normal and combined loading”, 2023. DOI
- E. AliAbbasi, V. Aydingul, A. Sezgin, U. Er, S. Turkuz, and C. Basdogan. “Tactile perception of coated smooth surfaces”, 2023. DOI
- E. AliAbbasi, A. Akseki, A. Ullah, and K. Pekkan. “Tension controlled two-axis hollow-fiber winding machine for blood oxygenator prototypes”, 2022. DOI
Hands-on-Demos
- V. Martinez-Missir, G. Vega, E. AliAbbasi, and P. Strohmeier. “HapticThings: Tangibles to deliver grain-based vibrotactile compliance illusion”, IEEE World Haptic Conference (WHC), Hands-on-Demos, Suwon, Korea, 2025. [PDF]
Projects
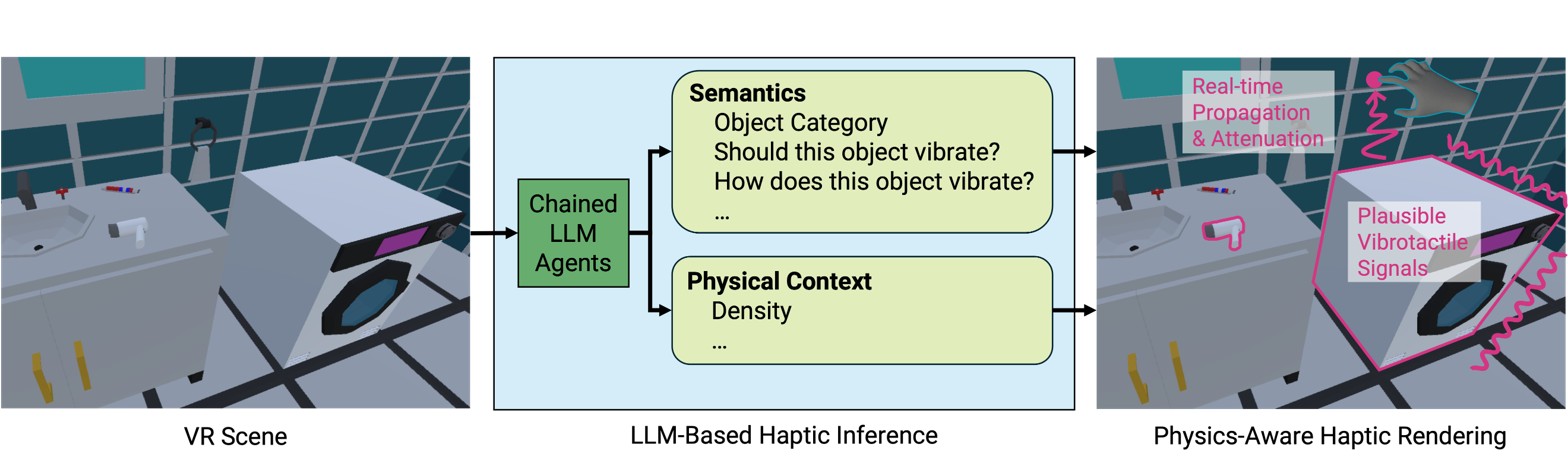
Scene2Hap: Combining LLMs and Physical Modeling for Automatically Generating Vibrotactile Signals for Full VR Scenes
We presented an LLM-centered system that automatically designs object-level vibrotactile feedback for entire VR scenes based on the objects' semantic attributes and physical context. Scene2Hap employs a multimodal large language model to estimate the semantics and physical context of each object, including its material properties and vibration behavior, from the multimodal information present in the VR scene. This semantic and physical context is then used to create plausible vibrotactile signals by generating or retrieving audio signals and converting them to vibrotactile signals. For the more realistic spatial rendering of haptics in VR, Scene2Hap estimates the propagation and attenuation of vibration signals from their source across objects in the scene, considering the estimated material properties and physical context, such as the distance and contact between virtual objects.
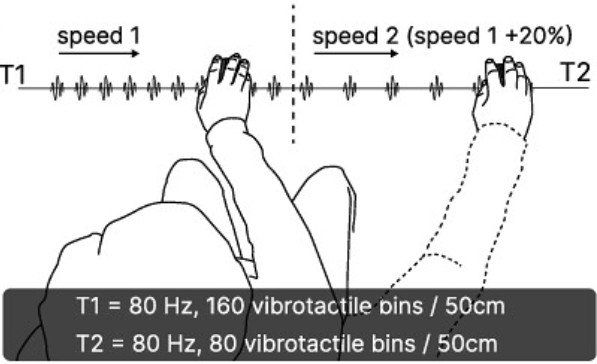
Haptic Redirection
We were inspired by the observation that vibrations arise when a finger moves over a textured surface, influenced by two factors: the scanning speed and the surface properties. We investigated if modifying vibrations can influence movement speed. Through three psychophysical experiments, we showed that: (1) Human movement speed is affected by the properties of vibrotactile feedback. (2) Movement speed remains unchanged during transitions if users are aware of vibrotactile feedback changes. However, we found that (3) movement speed increases by ∼20% when vibration pulses are reduced by 50%, provided users are unaware of the vibrotactile feedback change.
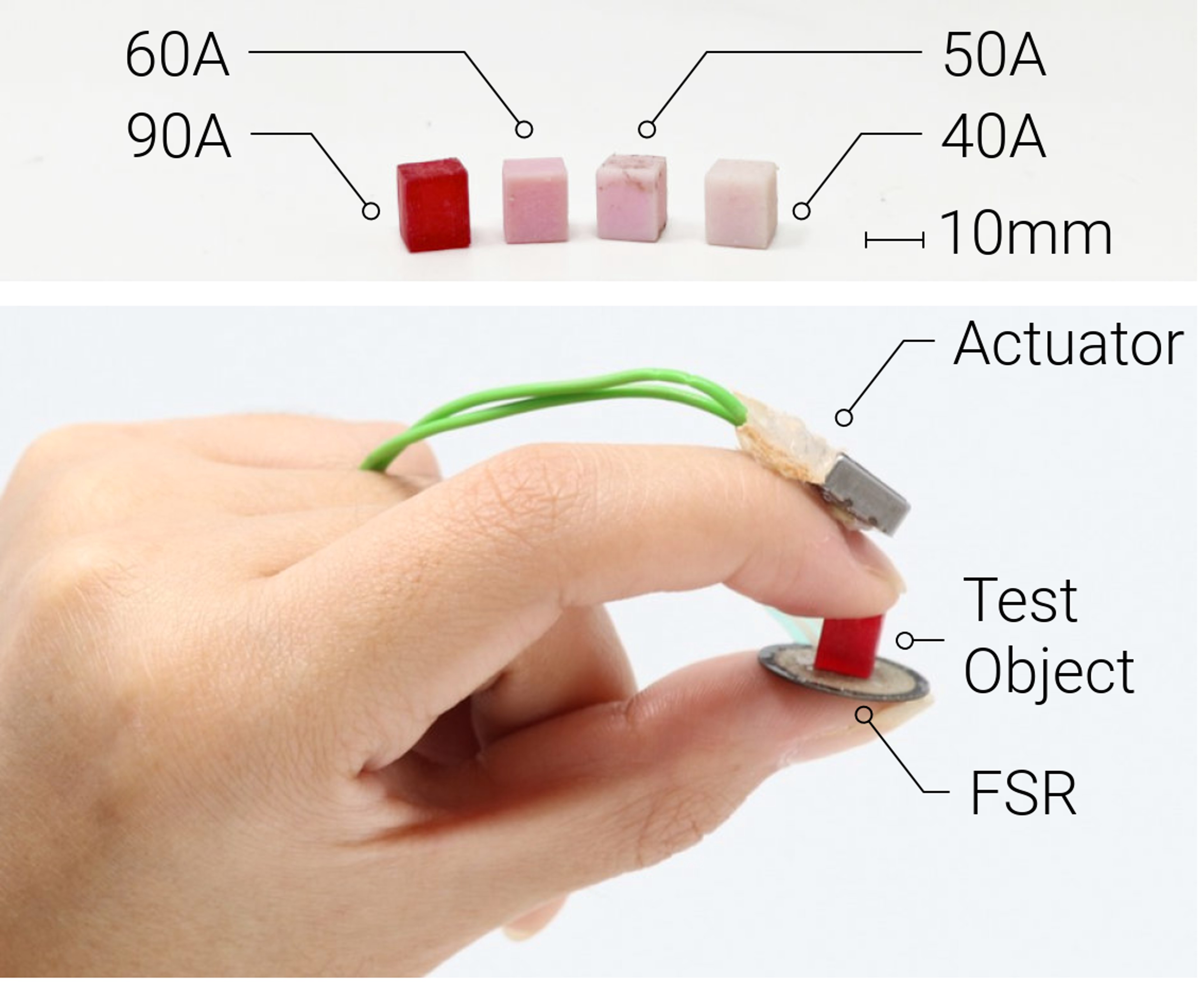
Physical Compliance and the Compliance Illusion: The Importance of Action for Perception
We present a detailed analysis of compliance estimates and pressure profiles of exploration behaviors of 12 participants while perceiving both physical and virtual compliance. Our results indicate that the experience of virtual compliance provided by the compliance illusion is distinct from that of physical compliance and that these experiences are mediated by distinct sensorimotor processes. This is evident in the non-additive nature of both real and illusory compliance perceptions and the separable exploratory actions of the participants in response to real and illusory compliance. These insights affect the design of augmented and virtual tactile reality systems, shed light on the mechanisms of compliance illusion, and provide data in support of closed-loop theories of tactile perception.
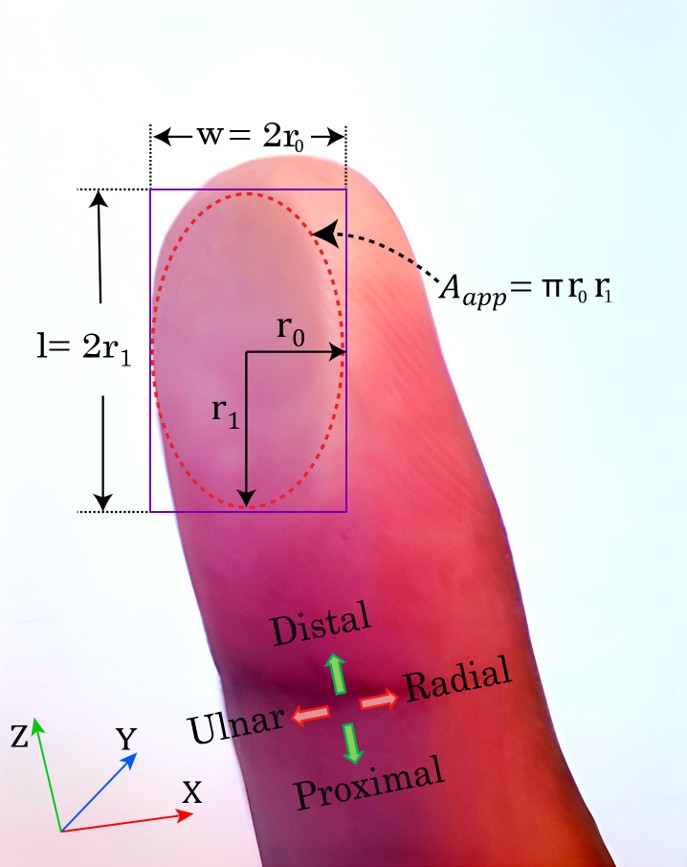
Effect of Finger Orientation on Contact Stiffness and Area During Sliding
We conducted an experimental study to investigate the evolution of apparent contact area between a human fingerpad and a smooth flat surface under normal loading (stationary finger) and combined loading (sliding finger) conditions for 4 different internal rotations of the index finger (away from the second finger) about its axial (longitudinal) axis and 2 different sliding directions. Our results show a reduction in the contact area for radial sliding as expected, but a surprising increase in the ulnar direction for the higher finger rotations. We argue that this asymmetric behavior in contact area evolution stems from the changes in the equivalent radius of curvature and stiffening of the finger as the rotation angle increases, which manifests itself as the asymmetric stress distribution at the leading and trailing edges of the fingerpad in our finite element simulations.
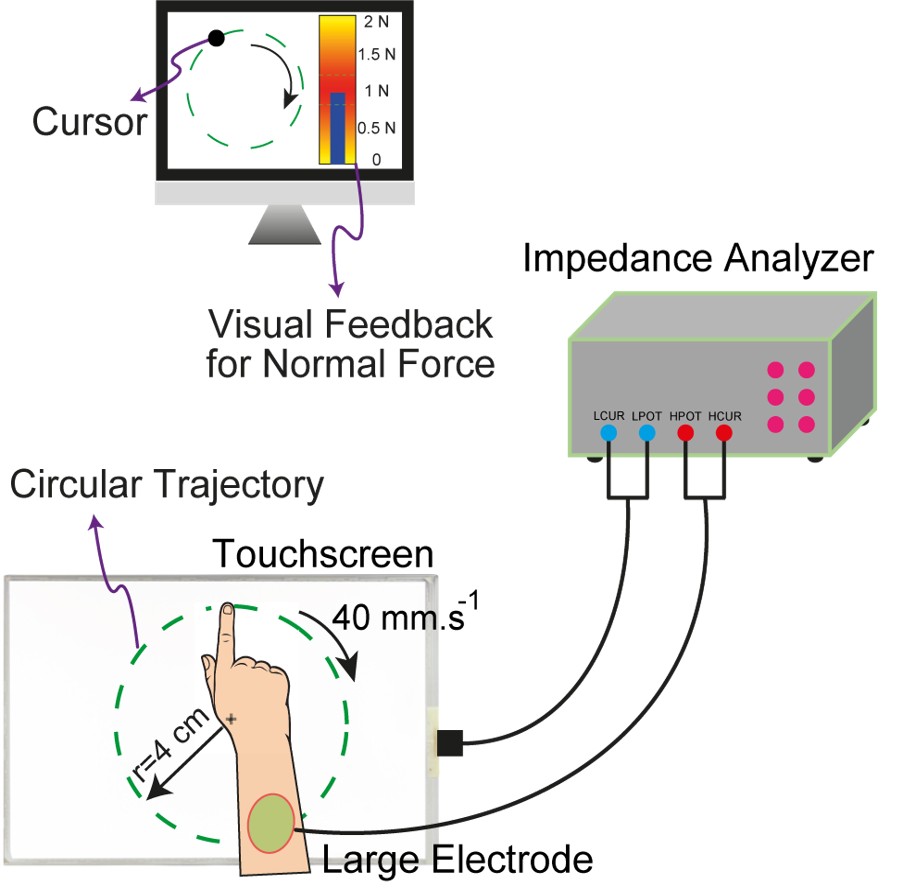
Experimental Estimation of Gap Thickness and Electrostatic Forces Between Contacting Objects Under Electroadhesion.
We proposed a new and systematic approach based on electrical impedance measurements to infer the electrostatic forces between two dielectric materials under electroadhesion (EA). The proposed approach is applied to tactile displays, where skin and voltage-induced touchscreen impedances are measured and subtracted from the total impedance to obtain the remaining impedance to estimate the electrostatic forces between the finger and the touchscreen. This approach also marks the first instance of experimental estimation of the average air gap thickness between a human finger and a voltage-induced capacitive touchscreen. Moreover, the effect of electrode polarization impedance on EA is investigated. Precise measurements of electrical impedances confirm that electrode polarization impedance exists in parallel with the impedance of the air gap, particularly at low frequencies, giving rise to the commonly observed charge leakage phenomenon in EA.
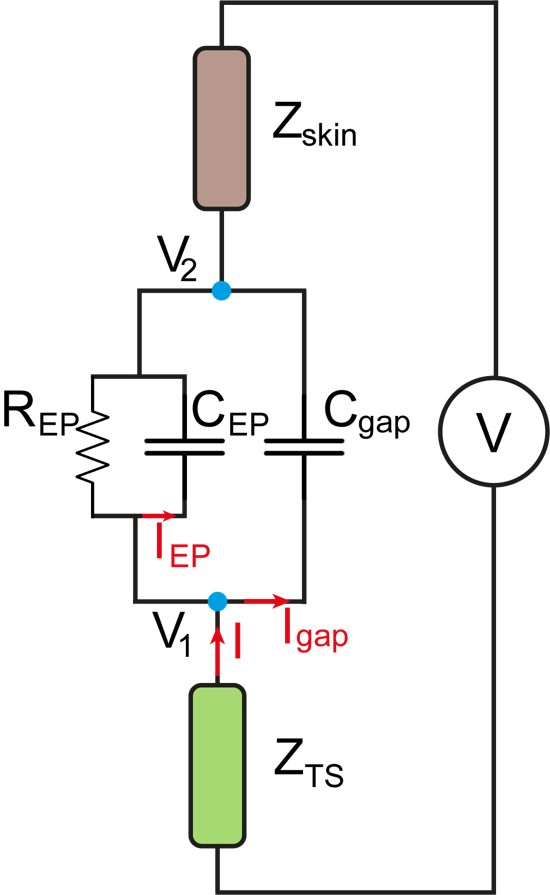
Effect of Electrode Polarization Impedance on Electroadhesion
We investigated the effect of electrode polarization (EP) impedance on electroadhesion (EA) between a human finger and a voltage-induced touchscreen. By conducting precise measurements of electrical impedances, we could ascertain the presence of EP impedance that operates in parallel with the impedance of the air gap between finger and touchscreen. Our findings indicate that the EP impedance plays a dominant role, particularly at low frequencies, thereby giving rise to the charge leakage phenomenon commonly observed in EA.
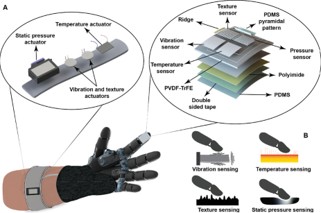
Electronic Skin (E-Skin)
Inspired by the sensory properties of skin, we presented a micro-fabricated, multiplexed electronic skin (e-skin) with actuators for sensory feedback in upper limb amputation. The piezoelectric-capacitive sensor array detects static pressure, temperature, vibration, and texture, with integrated actuators stimulating the skin to provide real-time feedback. The sensors integrate with actuators via readout electronics, making the system standalone and easy to use. The flexible, compact sensor array design (two pixels within a 1 cm² footprint) detects a wide range of pressure (0.5–10 kPa), temperature (22–60 °C), vibration (35–100 Hz), and texture (2.5–45 Hz), suitable for daily use. The e-skin, attached to a prosthetic finger, is tested for feasibility on human volunteers with wrist-mounted actuators.
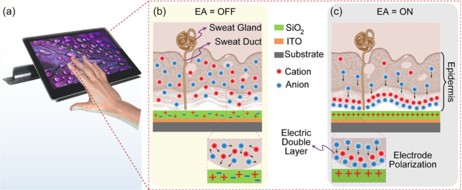
Effect of Finger Moisture on Tactile Perception of Electroadhesion
We investigated the effect of finger moisture on the tactile perception of electroadhesion with 10 participants. Participants with moist fingers exhibited markedly higher threshold levels. Our electrical impedance measurements showed a substantial reduction in impedance magnitude when sweat was present at the finger-touchscreen interface, indicating increased conductivity. Supporting this, our mechanical friction measurements showed that the relative increase in electrostatic force due to electroadhesion is lower for a moist finger.

Tactile Perception of Coated Smooth Surfaces
In this study, we first perform 2AFC experiments with 8 participants to quantify their tactile discrimination ability of 5 smooth glass surfaces coated with 3 different materials. We then measure the coefficient of friction between human finger and those 5 surfaces via a custom-made tribometer and their surface energies via Sessile drop test performed with 4 different liquids. The results of our psychophysical experiments and the physical measurements show that coating material has a strong influence on our tactile perception and human finger is capable of detecting differences in surface chemistry due to, possibly, molecular interactions.
Frequency-Dependent Electroadhesion
We investigated the frequency-dependent behavior of electrostatic forces between a human finger and a touchscreen. The experimental data (collected using our custom-made tribometer) showed that electrostatic force follows an inverted parabolic curve with a peak value around 250 Hz. An electro-mechanical model based on the fundamental laws of electric fields and Persson's multi-scale contact mechanics theory was developed. Compared to the existing ones in the literature, the proposed model takes into account the charge accumulation and transfer at the interfaces of finger and touchscreen. The model is in good agreement with the experimental data and shows that the change in magnitude of electrostatic force is mainly due to the leakage of charge from the Stratum Corneum to the touchscreen at frequencies lower than 250 Hz and electrical properties of the SC at frequencies higher than 250 Hz.
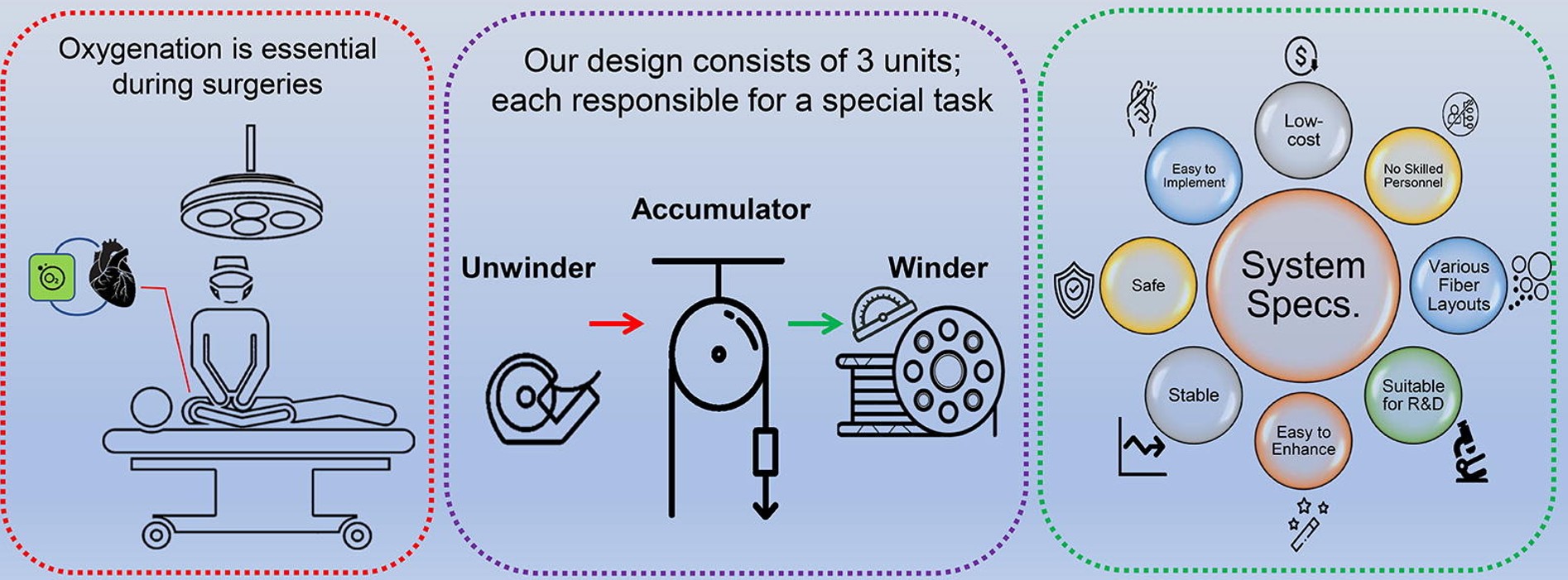
Fiber Winding Machine for Blood Oxygenator Prototypes
In this project, a hollow-fiber assembly system is designed and built for winding research grade extracorporeal blood oxygenator mandrels at different layout dimensions so that these different configurations can be evaluated for mass transfer capacity and blood damage. The hardware design and manufacturing details of this system presented together with its impact on the prototype oxygenator device assembly process.
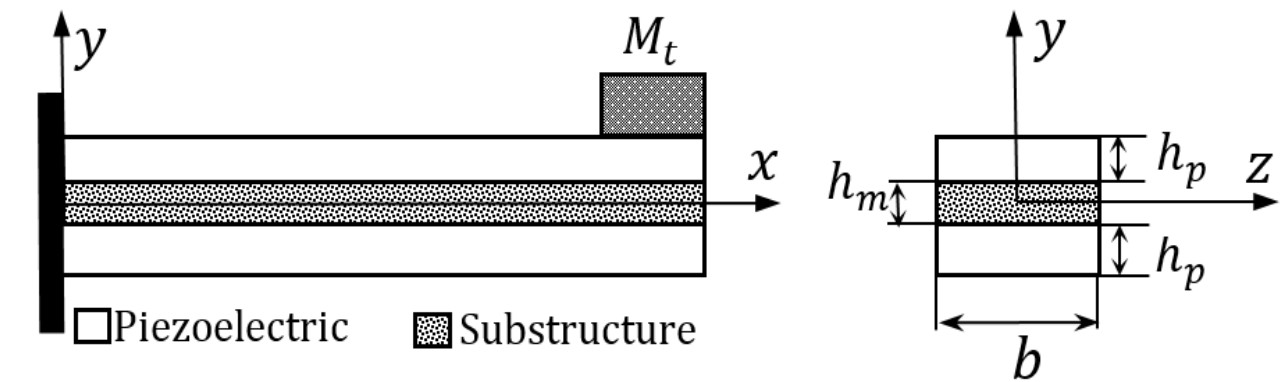
Vibration Analysis of MEMS Piezoelectric Cantilever Beam
In a series of papers, we presented the mathematical modeling to analyse the vibrational behavior of MEMS piezoelectric cantilever beams.
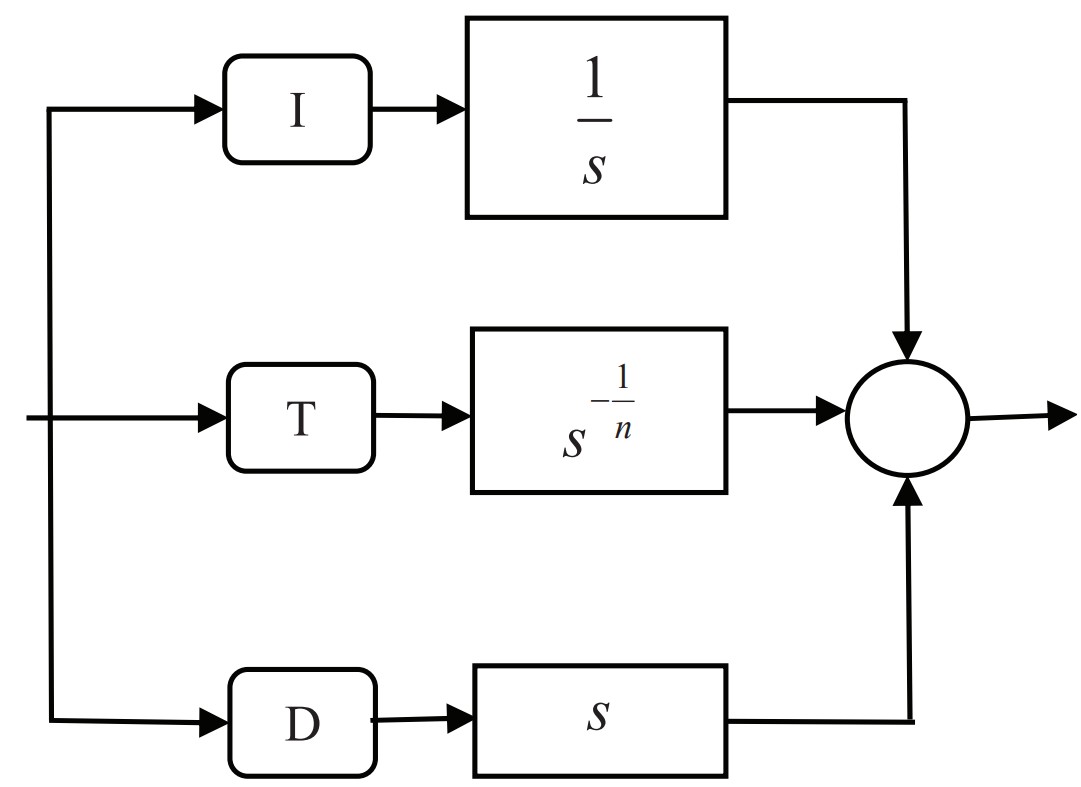
Applying of PID, FPID, TID, and ITID controllers on AVR system using particle swarm optimization (PSO)
We presented four PID, FPID, TID, and ITID controllers and applied each one on four different error functions in an AVR system by means of PSO algorithm. According to rising time, settling time and overshoot percentage, we prepared an understanding of finding the best controller easily while working with different error functions.
Supervision
Graduate Students of the Sensorimotor Interaction Group, Max Planck Institute for Informatics
M.Sc. Thesis, Elham Hamidian (11/2024 — 12/2025)
Graduate Students of the Robotics and Mechatronics Laboratory, Koç University
M.Sc. Thesis, Jahangier Ahmad (02/2021 — 11/2023)
M.Sc. Thesis, Volkan Aydingül (07/2021 — 07/2022)
Mechanical Engineering Graduate Project Students, Koç University
Gaye Sezen Dönmez, Mehmet Can Kilinçarslan, Selin Bekçi, Defne Altintuğ, Can Demir Candoğan, Yakup Can Karacaoğlu, Anil Yanıkçıoğlu, Selin Yalçın, Ege Melaoğlu, Sinan Noyan, Begüm Avdagiç, and Zeynep Işık Özbay (10/2020 — 01/2023)
Visiting Students in the Robotics and Mechatronics Laboratory, Koç University
B.Sc. Student, Eda Nur Var, Istanbul University (10/2021 — 12/2021)
Contact
I am always happy to collaborate on exciting scientific projects. Feel free to reach out by email if you are interested in starting a collaboration, think I could be helpful in any way, or would simply like to have a friendly chat. Master’s students from Saarland University are especially welcome to contact me if they are interested in pursuing their master’s thesis with me at the Max Planck Institute for Informatics.
Address: Max Planck Institute for Informatics, Saarland Informatics Campus, Building E1 4, 66123 Saarbrücken, Germany
Email: easa.aliabbasi[at]mpi-inf.mpg.de
Phone: +49 681 9325 5007